小结一下春节在家搞的玩具。
引言
本文相关代码,注意我用的optimal transport第三方实现因为license的问题,暂时没有以代码的形式放在里边儿,以后可能会换个别的实现包含进去。
所谓vector displacement map,就是把普通displacement map的每个元素给换成一个三维向量,使得被displace的表面不仅能向法线方向移动,也能在切平面上移动,就像这样:
 (上图来源于这里)
(上图来源于这里)
可以看到,只要VDM的分辨率足够高、作为其基底的uniform grid mesh足够精细,它就可以扭出任意我们想要的形状来(当然,拓扑不能变)。
我所面临的需求是使用很低精度的VDM,尽可能精确地表达出给定的形状。
相关工作
略。关键词如下,有兴趣可以去查已有的文献:
- Vector Displacement Map
- Regular Quadrilateral Mesh
- Geometry Images
Naive Solution
来看这个mesh:
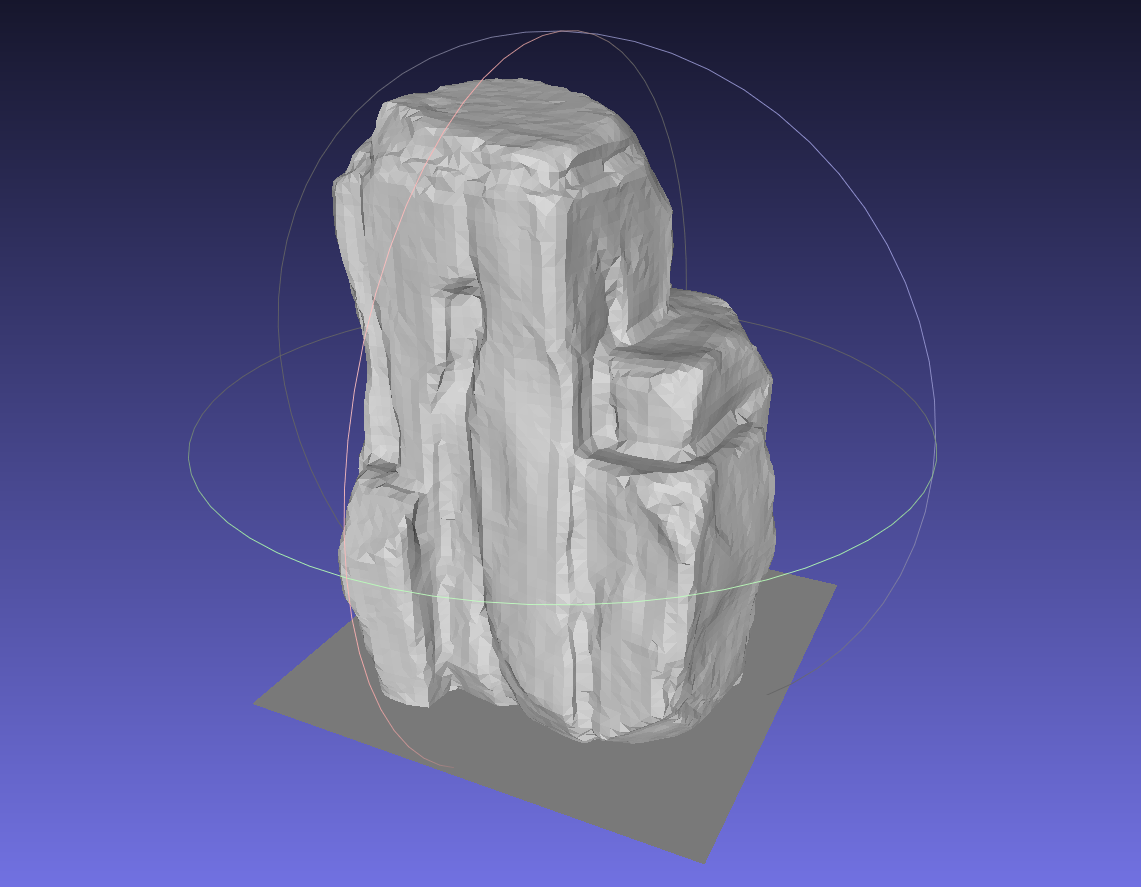
首先给它自动生成一套UV。严格地说,是做个固定边界的mesh parameterization。这会给mesh的每个顶点赋予一个uv。我们把uv作为“位置”,把mesh在上绘制出来,会得到这样的效果:
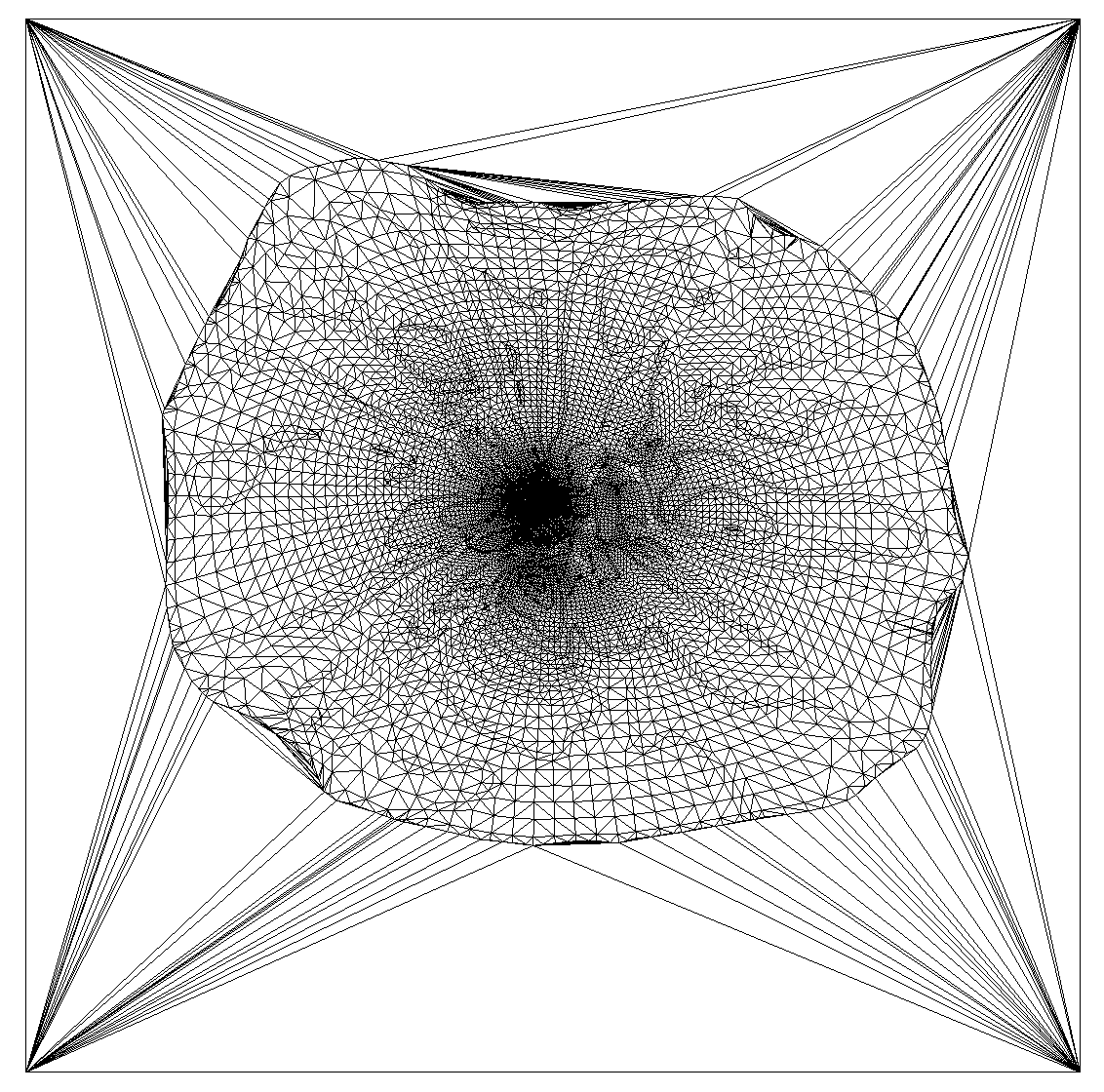
现在想象一下把uniform grid覆盖在这个区域上,那么这张图就告诉了我们uniform grid上的每个顶点对应原始mesh的位置。将在uniform grid上的原始位置记作,那么对应的displacement vector就是:
至此,我们得到了一张能把uniform grid扭出mesh形状的vdm:
Grid Density Optimization
这张VDM似乎还不错,但经不起细看。原始mesh的上半部分在世界空间中的表面积较大,但在参数空间中的面积较小,这导致uniform grid中只有很少的顶点是用来描述这部分mesh的,进而其细节损失了不少;与此相对,mesh底座的平面部分没有任何细节,却有大量grid顶点聚集在上面,既浪费了vdm的存储,又浪费了gpu处理顶点的算力。
我们把grid精度降低到32x32,问题会更明显:
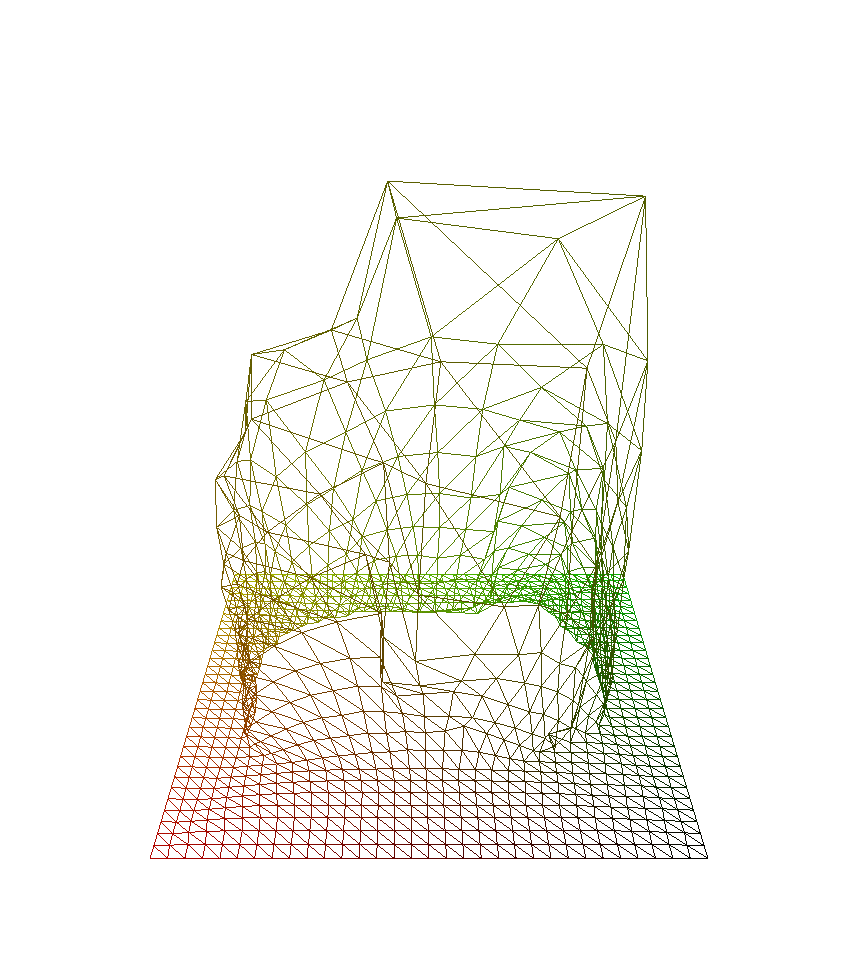
显然,grid的许多顶点被浪费在了无关紧要的地方,真正重要的形状特征却没采样到。这就是接下来需要解决的问题,我们将其划分为两个子问题:
- 如何确定mesh的哪些区域更加重要?
- 如何让grid在mesh的重要区域分布得更密集?
Vertex Importance
第一个问题比较简单,可以很容易地设计出成吨的启发式方案,比如计算原始mesh上的曲率、计算上述vdm拟合结果和原始mesh之间的差异等。我采用的方法如下:
记三角形的法线为;对非边界边,记包含的两个三角形为;对每个顶点,记与其相接的非边界边构成的集合为。那么顶点的重要度为:
说人话就是:与顶点相连的边对应的棱越是尖锐,此顶点就越是重要。
重要度计算无疑有更好的方案,但目前这个效果挺好,暂时就这样了。
Density Optimization
我们可以从以下两个思路出发来调整网格的密度:
- 调整mesh parameterization的结果,使得高重要度的顶点在参数空间分布得稀疏些。这在理论上是可行的,我之前仅仅是简单粗暴地使用了LSCM(least squares conformal maps)。然而我们需要在优化重要度分布的同时避免distortion,有点复杂,搁一边儿待考虑。
- 在参数空间把uniform grid的采样位置扭一扭,使之多采样重要度高的区域。这个实现起来要简单很多,有不少思路,比如把让重要顶点在参数空间吸引附近的grid顶点,然后把grid转换为弹簧模型求解。在这里,我采用的是另一个实现方法:
- 以每个顶点为中心,以其重要度为强度,随便选个kernel,把所有顶点splat到参数空间,得到一个importance field。
- 把importance field归一化成一个概率分布,在固定边界点的情况下计算均匀分布到它的optimal transport,得到一个bijective transport map,那么transport的目标位置就是uniform grid的采样位置。
方案2的optimal transport虽然也很难求解,但这是个标准问题,可以直接用第三方实现,不像方案1那样需要自己修改parameterization metric。 事实上,“用相对简单的方式做平面参数化,再在参数空间中进行调整”也是一种经典的参数化流程,其目的正是降低优化的难度。
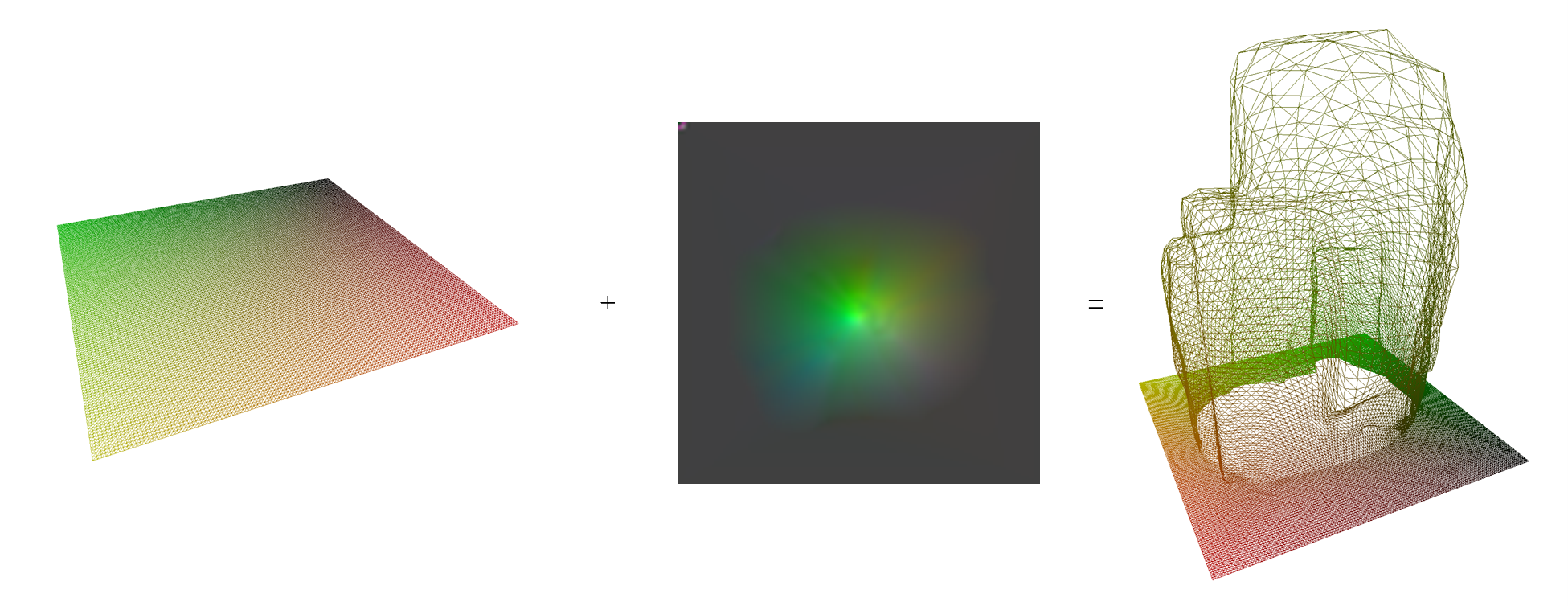
来看看效果,第一步得到的importance field如下:
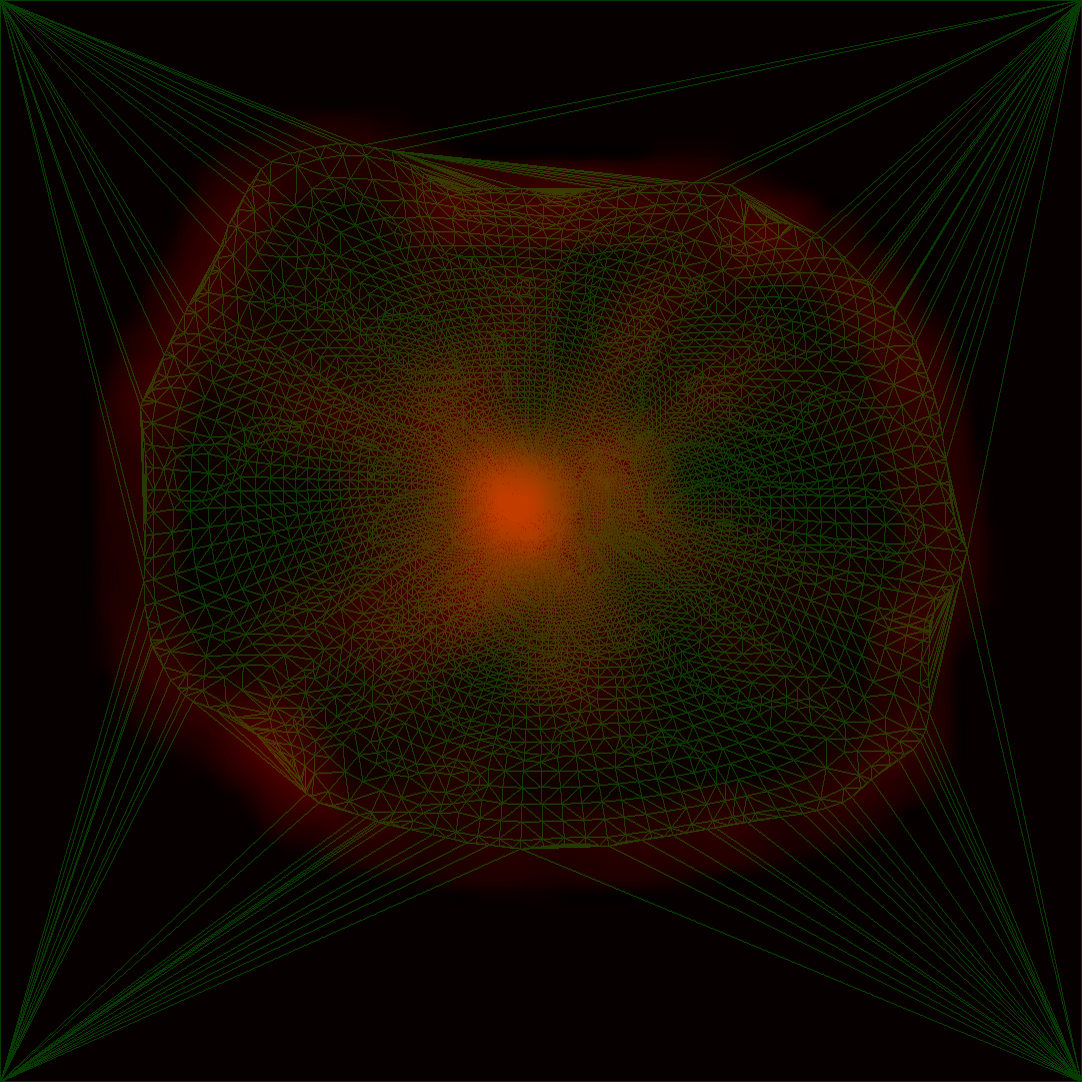
绿色的是mesh parameterization的结果,红色的是importance field。可以看到,石头和地面连接的部分因为变化比较锐利,形成了一圈高重要度区域;整个参数空间的正中间则对应mesh的上半部分,因顶点密集,同样形成了高重要度区域。
接下来跑个uniform distribution到importance distribution的optimal transport,就得到了对应的uniform grid扭法:
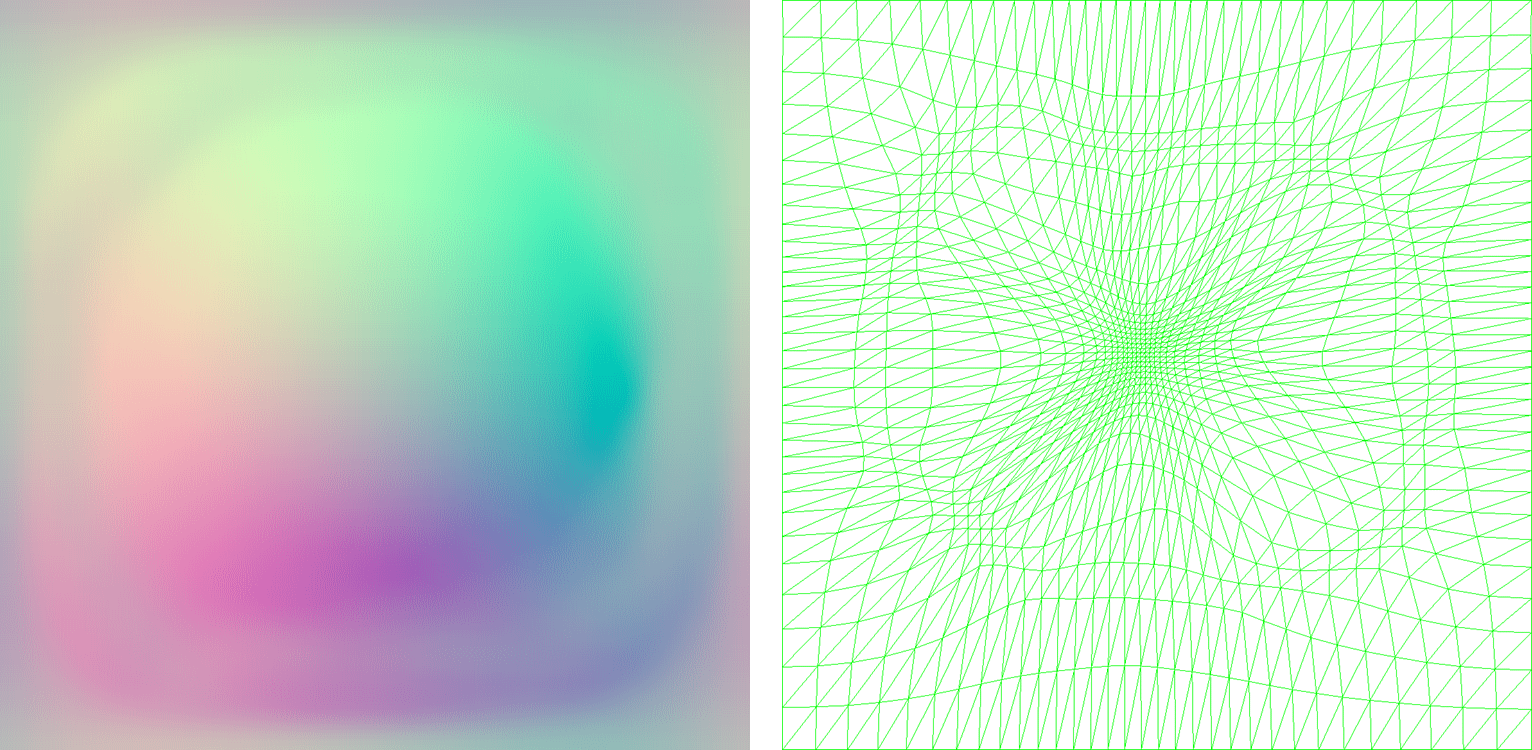
左边是transport map中grid顶点对应的位移,右边是按transport map调整grid采样位置后的结果。如我们所愿,重要度较高的区域现在有更高的grid密度。
最后,用新grid采样原始mesh,效果如下:
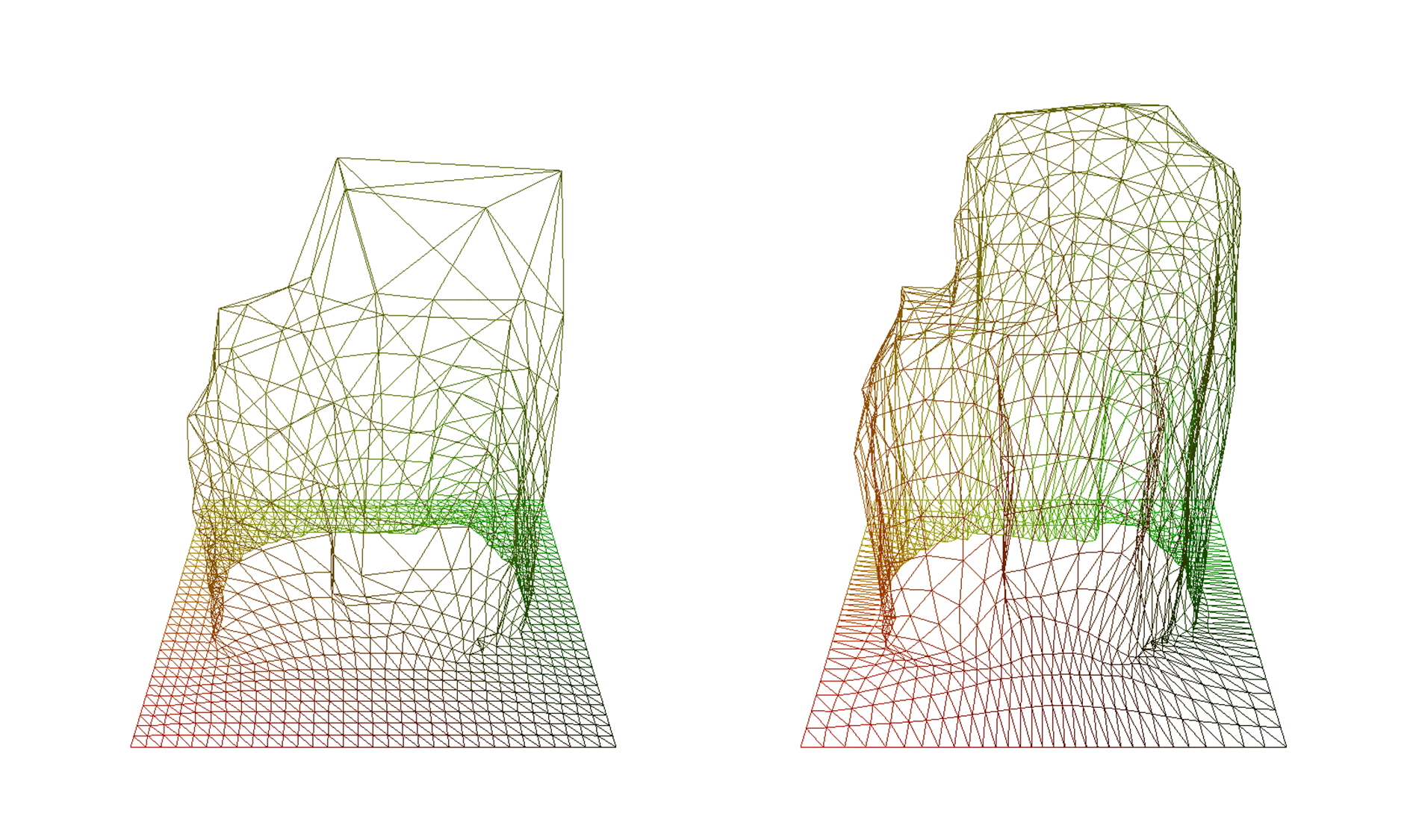
左边是原始版本,右边是新版本,棒极了。
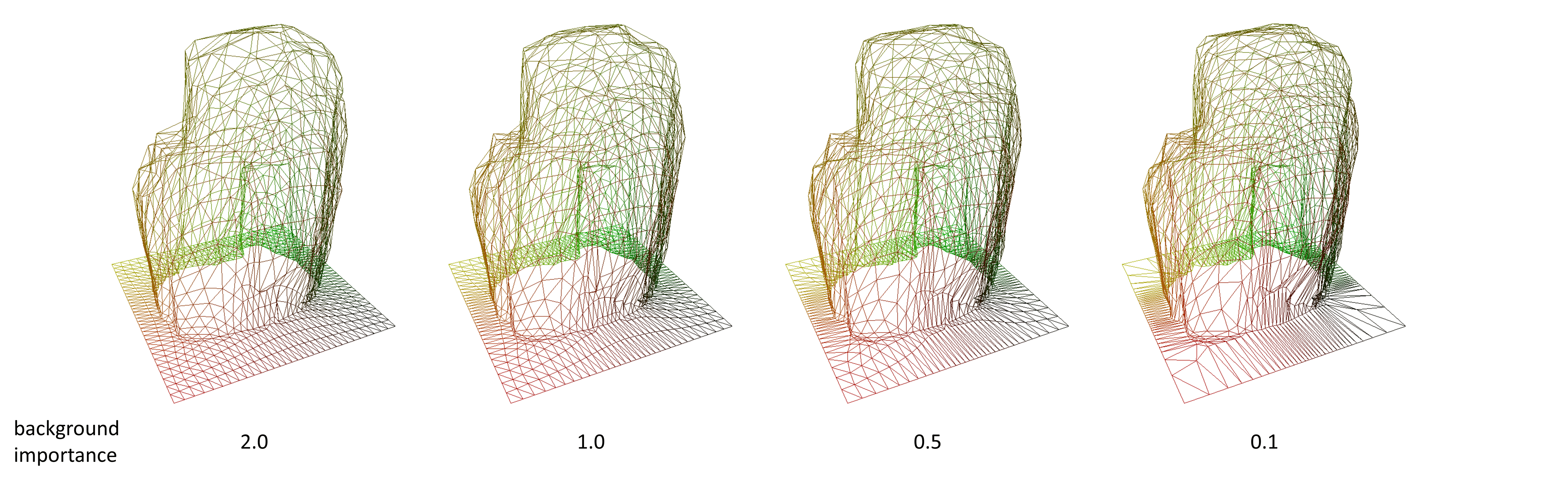
PS:在把顶点重要度splat到参数空间前,可以给背景板赋予一个初始重要度。调整这个值,就能控制顶点在不重要区域的密度,就像这样:
Sharp Feature Alignment
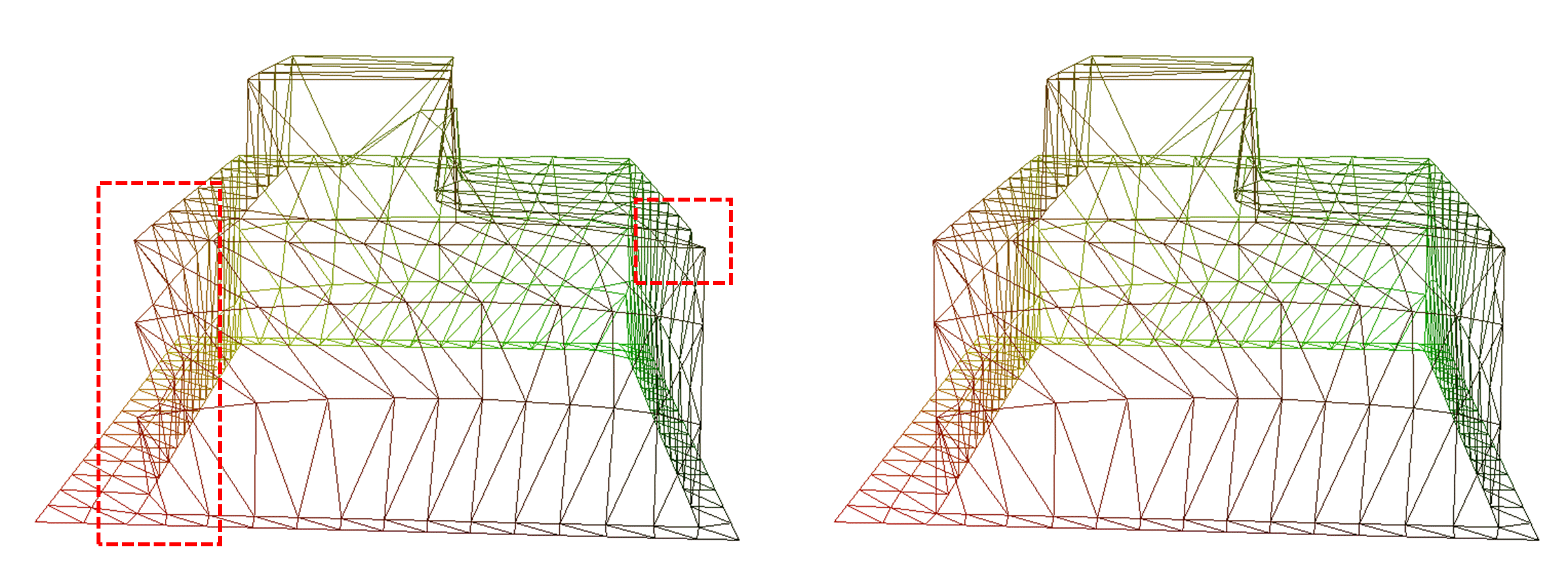
在优化了grid density后,VDM表达形状的能力已经比初始版本强许多了,但它仍然对锐利的棱角无能为力。比如:
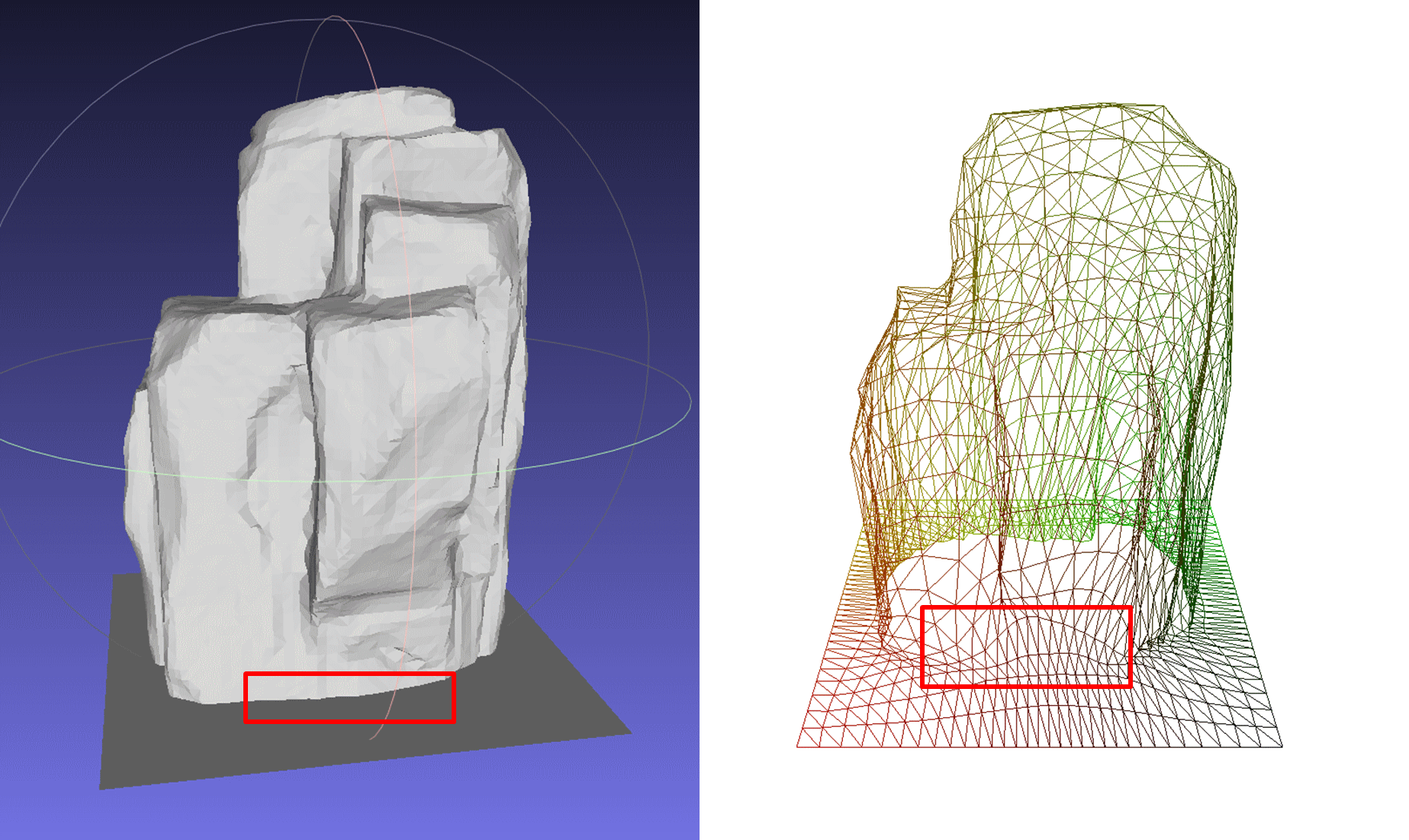
Mesh与底座相接的部分(红框中)接近于直角,在VDM中却表现得平滑了。事实上,即使我把这个VDM的分辨率翻两倍、翻四倍,问题也只是被缓解,无法根除。
显然,如果能微调grid的采样点位置,让其顶点正好落在mesh的角上,让其边正好落在mesh的棱上,就能精确地把mesh的棱角表达出来。我们把这些棱角统称为“sharp feature”,具体规定如下:
- 两个相邻三角形之间法线差异超过指定阈值时,将它们共享的边称为sharp edge。
- 与超过两条sharp edge相连的顶点被称为sharp corner。
在找到mesh中所有的sharp features后,就可以依照下述规则在参数空间微调grid的采样位置:
- Grid vertex离某个sharp corner很近时,把该grid vertex挪到corner在参数空间的位置上。
- Grid edge和某条sharp edge相交时,把grid edge上离交点近的那个grid vertex挪到交点处。
- 挪动前检查下会不会产生fold over,会的话别挪。
- 每个grid vertex至多被挪动一次。
来看看微调前后的效果对比:
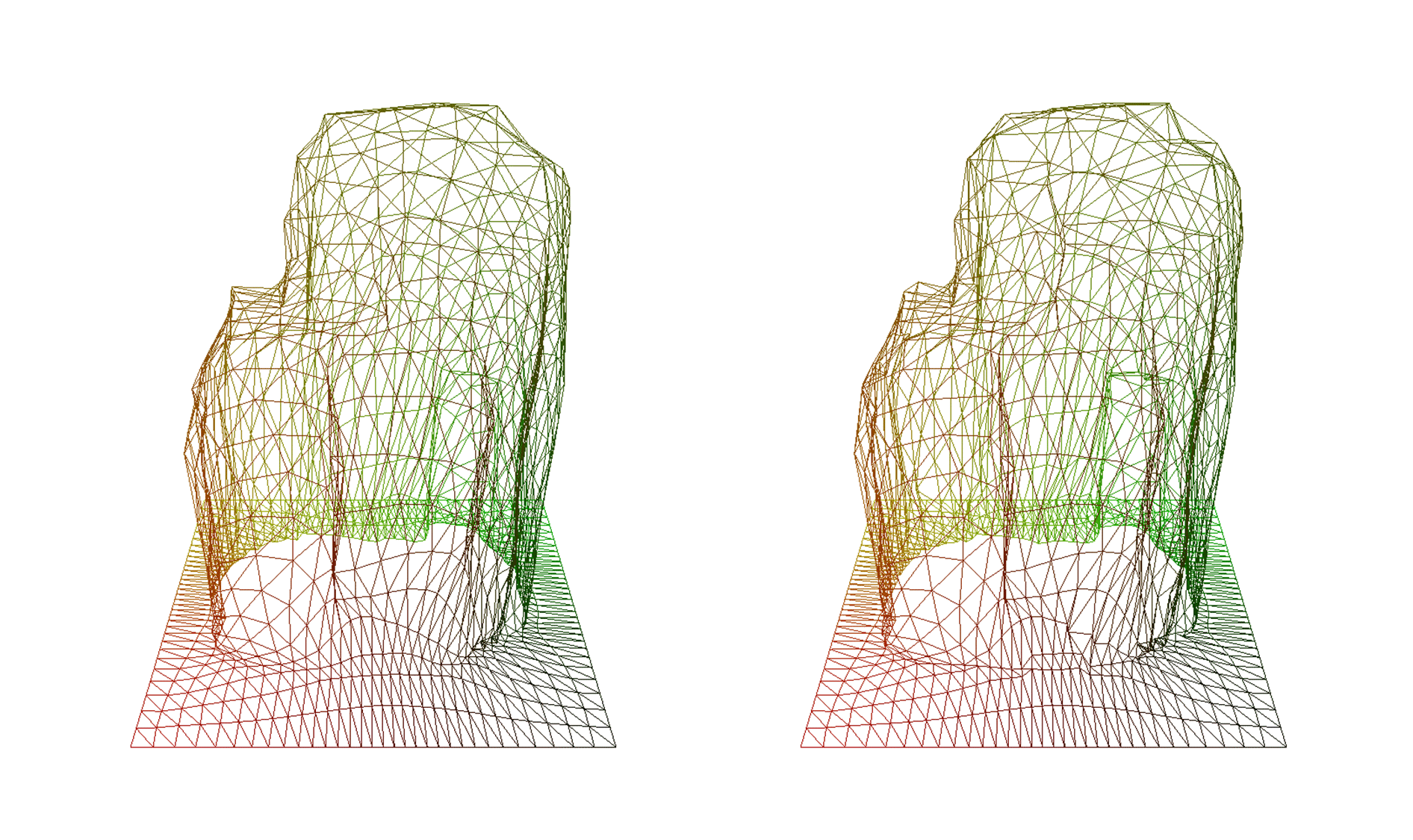
完美!
再看来个极端点的,用16x16的VDM拟合下面的方盒子:
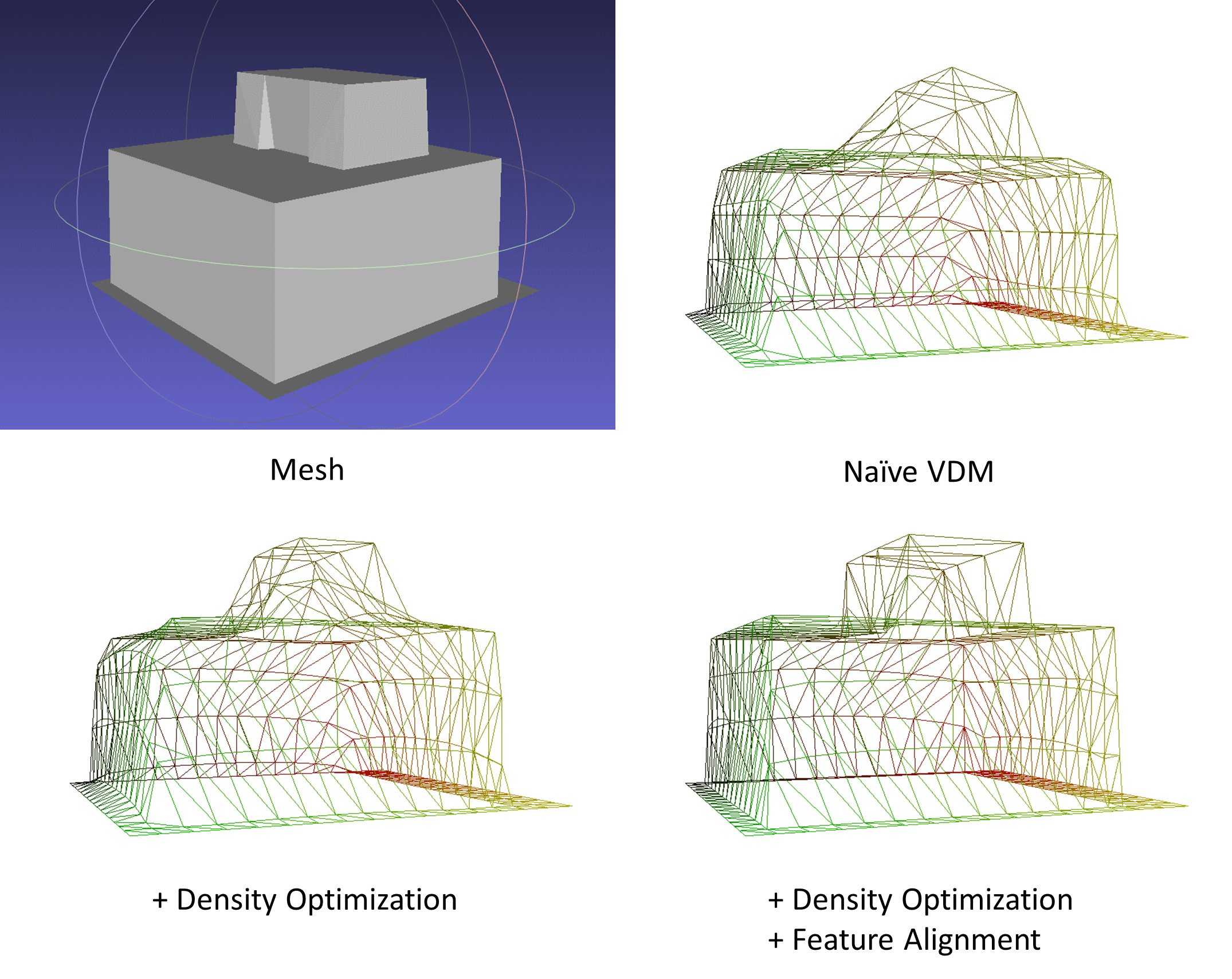
Grid density optimization和sharp feature alignment的效果都很明显
对角线方向
Grid由四边形构成,然而实际渲染时我们仍然需要把四边形都拆成三角形。此时,斜边的方向可能会受到sharp edge的影响。比如对四边形abcd,如果恰好有一条sharp edge穿过ac,那么我们就需要把abcd拆成abc,acd。
这意味着,每个quad都可能有自己的斜边方向,这对vdm的渲染是很不利的。如果想避免每个uniform grid都有自个儿的index buffer,就需要mesh shader之类的技术,在shader中根据vdm中额外记录的斜边方向信息动态生成三角形。
左边是全局统一斜边朝向的效果,右边是根据sharp edge情况调整了斜边朝向后的效果,难以忽视其间差异。
后话
有了如此高效的VDM,快扛起大旗,向每个人宣扬VDM的美好,让VDM的春风吹遍全世界吧!
什么,你问为什么不直接摆一个mesh在这?
嗯,好问题……
2025.08 补充:看看正规军的工作《Adaptive Surface Meshes from Harmonic Maps》,啧……